Сохрани ссылку в одной из сетей:
РЕАЛЬНЫЕ ГАЗЫ
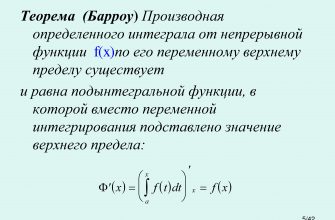
1. Уравнение
состояния газа Ван-дер Ваальса
1.
Реальный газ отличается от идеального.
Уравнение состояния идеального газа –
приближенно:
1) М.В.Ломоносов еще в XVIII
в. указывал, что давление, обусловленное
ударами о стенку хаотически движущихся
молекул, не будет подчиняться закону
Бойля
(при )
при больших концентрациях молекул;
2) как мы знаем из теоремы Нернста, и при
низких температурах
давление является функцией плотности
;
3) существуют и другие количественные
и качественные нарушения уравнения
Клайперона-Менделеева .
В частности, реальные газы могут быть
переведены в жидкое состояние, а
идеальные, следуя этому уравнению, —
нет.
- Основной причиной наблюдаемых отличий
реальных газов от идеальных является
наличие сил взаимодействия между
молекулами реальных газов. - Силы взаимодействия можно классифицировать
следующим образом: - а) химические или валентные, если возникло
новое соединение; - б) кулоновские силы притяжения и
отталкивания, если газ ионизирован - (плазма — квазинейтральный ионизированный
газ); - в) молекулярные силы
силы Ван-дер-Ваальса (1837-1923).
Именно они нас и будут интересовать.
Это силы притяжения между молекулами
на “больших” расстояниях диаметра
молекул. Природа этих сил электростатическая,
однако взаимодействие молекул не
описывается законом Кулона, т.к. каждая
молекула
- (
ядро и электронная оболочка) представляет
собой электронейтральную систему. - Если в отсутствии внешних полей центры
положительных и отрицательных зарядов
не совпадают, то такие молекулы называются
полярными. - Если электронная оболочка симметрична
и центры положительных и отрицательных
- зарядов в молекуле совпадают, то мы
имеем дело с неполярными молекулами. - Под действием электрического поля
- а) неполярные молекулы поляризуются за
счет деформации электронной оболочки; - б)
полярные молекулы ориентируются по
полю. - Вокруг каждой поляризованной молекулы
возникает быстро убывающее с радиусом
электрическое поле . - Если в поле
молекулы 1 окажется молекула 2, то она
будет поляризоваться и притягиваться
к 1-ой молекуле под действием дисперсионной
кулоновской силы.

Энергия взаимодействия
двух молекул имеет следующий вид

-


— потенциал Леннарда-Джонса является
аппроксимацией энергии взаимодействия
молекул . При этом - — аппроксимация сил отталкивания,
- — аппроксимация сил притяжения.
Аппроксимация (от лат. approximo–приближаюсь)
–приближенное выражение какого-либо
математическкого объекта через другие
более простые.
- Потенциал Леннарда-Джонса используется
в теории газов и дает хорошее совпадение
с экспериментом для реальных газов. - 2. Модель: В простейшей теории
используется ещё более грубая пунктирная
аппроксимация, - соответствующая следующей модели:
- 1) Газ состоит из твердых упругих
шариков диаметром . - 2) Молекулы-шарики притягиваются на
расстоянии радиуса
сферы молекулярного действия
при .
3. Учёт притяжения.
Из-за взаимного притяжения между
молекулами газ как бы сжимается эффективно
большим давлением, чем давление ,
оказываемое газом на стенки сосуда.
Величина этой положительной добавки к
пропорциональна произведению числа
молекул, содержащихся в единице объема
каждого из взаимодействующих объемов
и ,
т.е. ~
— квадрату концентрации:

— давление в реальном газе,
— давление этого газа на стенки,
— добавка, возникающая из-за наличия сил
притяжения между молекулами.
4. Учет отталкивания.
Учтем силы отталкивания в рамках
предложенной модели, предполагая
существование объема недоступного для
движения молекул вследствие конечности
их размера .


Если у нас 1 моль, то объем, доступный
движению молекул, ,
где
— несколько объемов молекул, содержащихся
в моле.
5. Уравнение Ван-дер-Ваальса.
Тогда подправим уравнение состояния
одного моля идеального газа, написав
уравнение состояния для 1 моля газа
Ван-дер-Ваальса:

где ,
— постоянные коэффициенты,
определенные для любого газа.
Если у нас не один моль, а
молей, тогда


- уравнение
состояния газа Ван-дер-Ваальса. - Еще раз о смысле каждой скобки,
и :
первая скобка – реальное давление
внутри, вторая – объем, доступный
движению,
— притяжение молекул,
— “мертвый” объем. - 6. Качественные вопросы
- 1) Изобразим изохору реального газа в
координатах - То есть для реального газа увеличение
температуры при постоянном объеме
вызывает более резкий рост давления,
чем для идеального газа: - P
- Т
- 2) Изобразим изобару в координатах
- T При
,
т.е. второе слагаемое больше третьего
- график приближается к асимптоте сверху.
- V
- 2.
Внутренняя энергия газа Ван-дер-Ваальса - 1. Внутренняя энергия В-д-В газа
- — потенциальное поле притяжения молекул
- При расширении работа, совершаемая
силами притяжения молекул газа, равна
убыли его потенциальной энергии,
связанной с притяжением молекул: -
— часть давления, обусловленная притяжением
молекул.
2. Задача об убранной перегородке для
реального газа.
- а) Для идеального газа:
- б) Для Ван-дер-Ваальсовского газа:
То есть с увеличением объематемпература
газа понижается, т.к. внутренняя энергия
газа расходуется на работу против сил
притяжения молекул. В этом отличие
реального газа от идеального.
3. Эффект Джоуля-Томпсона
Вопр.
Что будет происходить с температурой
реального газа после его прохождения
через пористую перегородку, если ?
Отв. Для идеального газа температура
не изменится, а для реального газа будет
наблюдаться эффект Джоуля- Томпсона.
а) Если ,
то эффект притяжения доминирует над
отталкиванием, поэтому ,
и температура газа понижается.
Это — положительный эффект Джоуля-Томпсона.
Газ охлаждается, так как при расширении
внутренняя энергия расходуется на
работу против сил молекулярного
притяжения. Этот эффект используется
для ожижения газов и получения низких
температур.
б) При
и газ нагревается. Это – отрицательный
эффект Джоуля-
Томпсона.
Отрицательный эффект Джоуля-Томпсона
реализуется для
и ,
у которых ,
т.е. притяжение очень слабое, а свобода
передвижения при расширении возрастает.
- Для общего развития: ,
- где
—
энтальпия – еще один термодинамический
потенциал. - 3.
Теплоемкость газа Ван-дер Ваальса - Здесь —
это давление газа на стенку, так как
работа совершается газом над внешними
телами. - Проведем расчет теплоемкости для одного
моля реального газа при различных
процессах: - 1) Изохорический
- ,
как и для идеального газа - 2) Адиабатический
политропические - ,
как и для идеального газа процессы - 3)
- 4)
Найдем .
Для этого необходимо найти .
- ,
т.о. ,
и изобарический процесс не является
политропическим для газа
- Ван-дер-Ваальса.
- 4.
Уравнение адиабаты для газа Ван-дер-
Ваальса - уравнение адиабаты В-д-В
газа. - 5. Энтропия газа
Ван-дер Ваальса - 1)
-
— энтропия одного моля.
- 2) Как
измениться энтропия газа в задаче об
убранной перегородке: - То есть
- 6. Уравнение
политропы В-д-В газа - Уравнение адиабаты для В-д-В газа:
- Для идеального газа уравнение адиабаты:
- По аналогии естественно предположить,
что для В-д-В газа уравнение политропы
будет иметь вид: - Проверим это:
- ,
так как процесс политропический =. - или уравнения политропы В-д-В газа,
здесь . - 7. Изотермы
Ван-дер-Ваальса - Т
- Мы
уже изображали: - а) изобару
- V
- P
- б) изохору
- T
- в) Изотермы, построенные в координатах
(P,V), дают
наиболее содержательные результаты. - Найдем особые точки изотермы, вычислив
: - Найдем корни этого уравнения:
- точное
решение дает ,
оно соответствует минимуму на изотерме
В-д-В газа. -
соответствует максимуму на изотерме
В-д-В газа.
Т.о. чем ,
тем ближе
к ,
и критическая изотерма имеет только
точку перегиба К, которая называется
критической точкой (Эндрюс 1861-1869).
В точке К с параметрами
вещество находится в критическом
состоянии.
— критическая температура (температура
абсолютного кипения по Менделееву),
выше этой температуры газ не может быть
сконденсирован в жидкость никаким
увеличением давления.
К понятию критического состояния можно
придти путем анализа экспериментальной
изотермы без рассмотрения какого-либо
теоретического уравнения состояния.
Уравнение В-д-В является лишь модельным,
и не все состояния, совместимые с
уравнением В-д-В, могут быть реализованы.
Реализованы могут быть только устойчивые
состояния.
Одно из необходимых условий
термодинамической устойчивости
однородного вещества:
Оно означает, что при изотермическом
увеличении давления
объем
должен уменьшаться.
Следовательно, участок AB
на изотерме должен быть выброшен.
- Участки AC и BD
соответствуют разным фазовым состояниям
вещества. - 8. Экспериментальные
изотермы реального газа - В изучение этого вопроса значительный
вклад внесли следующие исследователи:
Ван Марум (1750-1837), Фарадей (1791-1867), Эндрюс
(1813-1885). - Опред. В термодинамике фазой
называется совокупность однородных,
одинаковых по - свойствам частей системы.
- Различают следующие фазы: газообразная,
жидкая, различные кристаллические - модификации.
- Разные фазы могут существовать в
равновесии друг с другом. - Переход вещества из одной фазы в другую
называется фазовым переходом. - Существуют фазовые переходы:
- жидкость
газ; - газ
твердая фаза; - жидкость
твердая фаза. - Фазовый переход I
рода сопровождается выделением/поглощением
тепла. - твердая фаза
твердая фаза; - резистивное состояние
сверхпроводящее состояние; - обычная жидкость
сверхтекучая жидкость. - При фазовых переходах II
рода нет выделения/поглощения тепла. - Реальные
изотермы имеют горизонтальный участок
EF, на котором процесс
сжатия не сопровождается постом
вследствие образования другой фазы.
На участке EF жидкость и
газ находятся в термодинамическом
равновесии (т.д.р.)
- Условия термодинамического равновесия
фаз: - Таким образом мы распространили уравнение
Ван-дер Вальса на область жидкого
состояния, где оно вообще-то не применимо. - Газ, находящийся в равновесии с
жидкостью, называется насыщенным паром.
Вопр.: Какая разница между паром и
газом?
Отв. Пар – это газ, который может
быть превращен в жидкость изотермически.
Пар – это газ с температурой ниже
критической.
В значительной степени двойственная
терминология обусловлена исторически:
те газы, которые могли быть превращены
в жидкость, называли парами, а те, которые
ожижить не удавалось, — газами. Когда
все газы сжижили, то необходимость в
различии названий отпала.
В
критической т.К параметры системы
можно определить по методу Эндрюса из
серии экспериментальных изотерм, но
это громоздко. Проще – метод исчезновения
мениска. Обсудим изменение фазового
состояния вещества (эфира) в запаянной
стеклянной ампуле при изохорическом
нагревании:
Из т.1
в т.К: мениск остается на месте, но
становится более горизонтальным, т.к.
свойства пара и жидкости становятся
более близкими. В т.К мениск исчезает.
Из т.2в
т.Е (жидкости было «больше, чем нужно»):
мениск повышается, пока вся мензурка
не заполнится жидкостью.
Из т.3в
т.F (жимдкости было «меньше,
чем нужно»): мениск понижается, пока вся
ампула не
- заполнится газом.
- На самом деле —
сжимаемость вещества в критической
точке бесконечна, - следовательно, вещество внизу ампулы
должно заметно уплотняться вследствие - гравитации, поэтому благодаря сильному
изменению плотности вещества с высотой, - в ампуле иметь критическую плотность
может только бесконечно тонкой слой
вещества. - В нем и происходит исчезновение мениска.
В этом заключается суть метода мениска
для - измерения критической температуры .
- В критической точке вещество обладает
необычными свойствами: - 1) бесконечной сжимаемостью;
- 2)
- 3)
медленность установления равновесного
состояния влечет за собой гистерезис
плотности. - Метастабильные участки AE
и BF могут существовать: - BF соответствует пересыщенному
пару, который может быть получен при
резком адиабатическом расширении.
EA соответствует перегретой
жидкости, она может быть получена резким
уменьшением давления. Это – физически
однородная жидкость, в которой нет
растворенного газа.
- Горизонтальный участок изотермы EF
определяется правилом Максвелла: . - Рассмотрим цикл
и применим к нему равенство Клаузиуса
,
так как процесс равновесный и это
изотермы.
Вопр.: Рассмотрим два цикла
и .
Рассуждая аналогично, получим для любого
из них: ,
то есть
любого из них равна нулю – противоречие.
В чем дело?
Отв.: 1) Для цикла
в точке
происходит переход однофазного вещества
в двухфазное, а это необратимый процесс
,
что и существует на самом деле.
2) Для цикла ,
— такой цикл невозможен, так как в точке
двухфазное
состояние не может перейти в однофазное.
В обратную сторону перход возможен, но
при этом
и противоречия нет.
Как
соотносятся
и
в точке ?
— правило рычага
9. Уравнение
Клайперона-Клаузиуса. Диаграмма состояния
- 1234 – цикл Карно с изотермическим реальным
газом. -
— уравнение Клайперона-Клаузиуса.
- Тангенс угла наклона кривой испарения
и - сублимации всегда больше нуля,
- следовательно, угол наклона соответствующих
кривых меньше . - Для плавления это может быть не так ().
- Диаграмма фазовых переходов
- Три фазы одного и того же вещества
могут существовать в равновесии только
в
одной точке, то есть при единственных
значениях .
Эта точка называется тройной.
- .
- Равновесие
более, чем трех фаз одного и того же
вещества невозможно. - Параметры критичного состояния для :
,
218 атм, . - 10. Другие уравнения
реальных газов - 1) Бертло
-
(при умеренных давлениях лучше согласуется
с опытом) - 2) Клаузиус
-
(точнее за счет лишнего подгоночного
параметра) - 3) Камерлинг-Оннес
- ,
где
— вариальные коэффициенты.
Уравнение Ван-дер Вальса имеет преимущества
вследствие легко объяснимого физического
смысла параметров. Его-то и надо уметь
пояснять.
Источник: https://gigabaza.ru/doc/100413.html
Уравнение Ван-дер-Ваальса в физике
При низких давлениях и высоких температурах закон Менделеева-Клапейрона также довольно точно описывает поведение реальных газов, однако в других условиях реальные газы значительно отклоняются от идеальности. Уравнение Ван-дер-Ваальса учитывает эти отклонения.
Формула уравнения Ван-дер-Ваальса
Уравнение Ван-дер-Ваальса имеет вид:
![]()
В этом уравнении n – количество молей газа, р – его давление, V – занимаемый газом объем, Т – абсолютна температура газа. Универсальная газовая постоянная имеет значение 8,31441 Дж/(моль•К), одинаковое для всех газов.
Переменная а – это поправка на силу притяжения между молекулами газа. Под действием этой силы молекулы притягиваются друг к другу, внутрь газа, уменьшая давление на стенку. Переменная b – поправка, учитывающая собственный объем, занимаемый молекулами газа. Эти поправки зависят от вида газа, и могут быть найдены из таблиц либо рассчитаны по следующим формулам:
-

- Здесь и – это давление и абсолютная температура газа в критической точке, то есть в точке перехода газообразной фазы в жидкую.
В реальном газе расстояния между молекулами меньше, чем в идеальном, и сравнимы с размерами самих молекул. Поэтому силы взаимодействия между молекулами становятся достаточно большими.
В объеме газа молекула со всех сторон окружена другими молекулами, и силы их притяжения уравновешиваются. Однако когда молекула приближается к стенке, силы притяжения больше не уравновешиваются и «втягивают» её внутрь.
Поэтому молекула движется к стенке медленнее, из-за чего давление на стенку уменьшается. Это и учитывает поправка а.

Кроме того, за счёт сил межмолекулярного взаимодействия реальные газы способны переходить в жидкое состояние, и уравнение Ван-дер-Ваальса довольно точно описывает поведение газов вблизи этого перехода.
Так как в реальном газе расстояние между молекулами сравнительно невелико, молекула должна пролететь меньшее расстояние, чтобы удариться о стенку. Поэтому при очень больших давлениях давление на стенку возрастает, и это учитывает поправка b.
Уравнение Ван-дер-Ваальса применяется, в частности, при определении параметров пара в теплотехнике и теплотехнике, при исследовании сжижения газов.
Примеры решения задач
| Понравился сайт? Расскажи друзьям! |
Источник: http://ru.solverbook.com/spravochnik/uravneniya-po-fizike/uravnenie-van-der-vaalsa/
§61. Уравнение Ван-дер-Ваальса
Как
уже указывалось в § 60, для реальных газов
необходимо учитывать размеры молекул
и их взаимодействие друг с другом,
поэтому модель идеального газа и
уравнение Клапейрона—Менделеева (42.4)
pVm=RT
(для
моля газа), описывающее идеальный
газ, для реальных газов непригодны.
Учитывая собственный
объем молекул и сил межмолекулярного
взаимодействия, голландский физик И.
Ван-дер-Ваальса (1837—1923) вывел уравнения
состояния реального газа. Ван-дер-Ваальсом
в уравнение Клапейрона—Менделеева
введены две поправки.
1.
Учет собственного объема молекул.
Наличие
сил отталкивания, которые противодействуют
проникновению в занятый молекулой объем
других молекул, сводится к тому, что
фактический свободный объем, в котором
могут двигаться молекулы реального
газа, будет не Vm,
a
Vm—b,
где
b
—
объем, занимаемый самими молекулами.
Объем b
равен
учетверенному собственному объему
молекул. Если, например, в сосуде
находятся две молекулы, то центр любой
из них не может приблизиться к центру
другой молекулы на расстояние, меньшее
диаметра d
молекулы.
Это означает, что для центров обеих
молекул оказывается недоступным
сферический объем радиуса d,
т.
е. объем, равный восьми объемам
молекулы, а в расчете на одну молекулу
— учетверенный объем молекулы.
2.
Учет притяжения молекул. Действие
сил притяжения газа приводит к появлению
дополнительного давления на газ,
называемого внутренним
давлением. По
вычислениям Ван-дер-Ваальса, внутреннее
давление обратно пропорционально
квадрату молярного объема, т. е.
- p'
= a/V2m,
(61.1) - где
а— постоянная Ван-дер-Ваальса,
характеризующая силы межмолекулярного
притяжения, Vm—
молярный объем. - Вводя
эти поправки, получим уравнение
Ван-дер-Ваальса для
моля газа (уравнение
состояния реальных газов):
(p+a/V2m)(Vm-b)=RT. (61.2)
Для
произвольного количества вещества v
газа
(v=т/М)
с
учетом того, что V
= vVm,
уравнение
Ван-дер-Ваальса примет вид
- где
поправки а и b
—
постоянные
для каждого газа величины, определяемые
опытным путем (записываются уравнения
Ван-дер-Ваальса для двух известных из
опыта состояний газа и решаются
относительно а
и
b). - При выводе уравнения
Ван-дер-Ваальса сделан целый ряд
упрощений, поэтому оно также весьма
приближенное, хотя и лучше (особенно
для несильно сжатых газов) согласуется
с опытом, чем уравнение состояния
идеального газа. - 106
Уравнение
Ван-дер-Ваальса не единственное
уравнение, описывающее реальные газы.
Существуют и другие уравнения, некоторые
из них даже точнее описывают реальные
газы, но не рассматриваются из-за их
сложности.
§ 62. Изотермы Ван-дер-Ваальса и их анализ
Для
исследования поведения реального газа
рассмотрим изотермы
Ван-дер-Ваальса —
кривые зависимости р
от
Vmпри
заданных Т,
определяемые
уравнением Ван-дер-Ваальса (61.2) для моля
газа.
Эти кривые (рассматриваются для четырех
различных температур; рис.
89) имеют
довольно своеобразный характер. При
высоких температурах (T>Tк)
изотерма реального газа отличается
от изотермы идеального газа только
некоторым искажением ее формы,
оставаясь монотонно спадающей кривой.
При
некоторой температуре Ткна
изотерме имеется лишь одна точка перегиба
К.Эта
изотерма называется критической,
соответствующая
ей температура Tк
— критической
температурой.
Критическая
изотерма имеет лишь одну точку перегиба
К,
называемую
критической
точкой; в
этой точке касательная к ней параллельна
оси абсцисс.
Соответствующие этой точке
объем
Vки
давление ркназываются
также критическими.
Состояние
с критическими параметрами (рк,
Vк,
Тк)
называется
критическим
состоянием. При
низких температурах (Т
Источник: https://studfile.net/preview/5965726/page:2/
Введение
|
Перейти к загрузке файла |
Законы идеальных газов — приближенные законы. Отступления от них носят как количественный, так и качественный характер. Количественные отступления проявляются в том, что уравнение Менделеева-Клапейрона соблюдается для реальных газов лишь приближенно. Реальные газы могут быть переведены в жидкое и твердое состояние.
Принимать во внимание будем только молекулярные силы. Пусть молекулы имеют вид твердых упругих шаров. Начнем сначала с влияния сил отталкивания или, что то же самое, с влияния конечных размеров молекул. Будем предполагать, что силы притяжения между молекулами не действуют. Влияние конечных размеров молекул качественно понять легко. При одних и тех же температурах и концентрациях число ударов о стенку больше в случае молекул конечного размера, чем в случае точечных молекул. Это объясняется тем, что передача импульса в газе по пространству, не занятому молекулами, происходит с тепловыми скоростями, а по пространству, заполненному абсолютно твердыми молекулами, — с бесконечной скоростью. В результате давление газа возрастает. Исследуем теперь вопрос количественно. Будем предполагать, что плотность газа не очень велика. Тогда случаи, когда одновременно сталкиваются три молекулы и более будут относительно редки. Много чаще будут встречаться такие случаи, когда сталкиваются между собой только две молекулы, а остальные молекулы в момент столкновения на них не действуют. Такие столкновения называются парными. Будем учитывать только их. Ясно что таким путем нельзя получить уравнение состояния газы, пригодное при больших плотностях. Можно рассчитывать лишь на получение поправок к уравнению Клайперона. |
Допустим, что в сосуде объема V с гладкими стенками находятся две одинаковые молекулы 1 и 2, совершающие тепловое движение. Величина давления на стенки определяется суммарной кинетической энергией молекул и не зависит от того, как это энергия распределена между молекулами.
Будем считать, что одна молекула остается неподвижной, а другая движется с удвоенной кинетической энергией. Результат расчета от этого не изменится. Центры молекул не могут сблизиться на расстояние, меньшее d (диаметр молекулы). Окружим молекулу 2 сферой ограждения радиуса d.
Движущуюся молекулу 1 можно считать точечной. Очевидно, она не может проникнуть внутрь сферы ограждения неподвижной молекулы. Это значит, что объем, доступный молекуле 1 уменьшается на объем сферы ограждения, т.е. на величину .
Эта величина равна учетверенной сумме объемов обеих молекул.
Пусть теперь в сосуде имеется N одинаковых молекул. При вычислении давления на стенку сосуда можно рассуждать так, как если бы половина из них 1/2N покоилась и была заменена соответствующими сферами ограждения, а молекулы другой половины были точечными и двигались бы с удвоенной кинетической энергией.
Тогда бы мы имели идеальный газ из N'=N/2 точечных молекул с температурой Т'=2Т. Этим молекулам был бы доступен объем сосуда V за исключением объема, занимаемого N/2 сферами ограждения других молекул. Обозначим этот последний объем b. Тогда объем, доступный движущимся молекулам будет равен V-b.
Давление, оказываемое этими молекулами на стенки сосуда, равно
Если в сосуде находится моль газа, то и тогда
(1)
,
т.е. учетверенному объему всех N молекул газа.
Рассмотрим теперь влияние сил молекулярного притяжения. Предполагая, что сил отталкивания нет, изменим модель газа. Молекулы будем считать точками, между которыми действуют силы притяжения.
В отличие от сил отталкивания, действующих на близких расстояниях, силы молекулярного притяжения являются силами дальнодействующими. Во взаимодействии участвует сразу много молекул, и схема парных столкновений становится непригодной. Окружим каждую молекулу сферой молекулярного действия.
Если эта сфера целиком находится внутри газа, то силы, действующие на рассматриваемую молекулу со стороны окружающих молекул, в среднем уравновешиваются. Но этого не будет, когда молекула находится вблизи границы газа со стенкой. Здесь сфера молекулярного действия лишь частично проходит в газе.
Появляется избыток молекул, тянущих рассматриваемую молекулу внутрь газа, над молекулами, тянущими ее наружу. Таким образом, вблизи стенки возникает пристеночный слой газа, толщина которого равна радиусу сферы молекулярного действия.
Каждая молекула этого слоя в среднем подвергается действию силы f, направленной в сторону газа. Величина силы f максимальна, когда молекула находится у самой стенки, и убывает при удалении от нее.
Когда молекула летит к стенке, а затем отражается от нее, то меняется ее импульс. Ежесекундное изменение импульса всех молекул, падающих на единицу площади стенки и отражающих от нее, равно .
Однако, в отличие от идеальных газов, импульс налетающих молекул изменяется не только под действием сил давления со стороны стенки, но под действием сил, с которыми их тянут внутрь газа молекулы пристеночного слоя. В частности, под действием этих последних сил молекула может отразиться внутри пристеночного слоя, не долетев до стенки.
Вместо сил, действующих на налетающие молекулы, можно по третьему закону Ньютона ввести равные молекулы пристеночного слоя. Пусть P — средняя сила давления газа на стенку, а средняя сила, с которой молекулы пристеночного слоя втягиваются внутрь газа. Тогда
, или
(3)
Видно, что давление на стенку P не зависит от материала стенки. Роль стенки может выполнять сам газ. Проведем мысленно произвольное сечение, разделяющее газ на две части. Давление одной части на другую будет таким же, как если бы это другая часть была твердой стенкой. Оно равно P, а не P+Pi или какой либо другой комбинации этих величин.
Сила Pi называется внутренним, или молекулярным давлением. Ее можно представить в виде Pi = где f — сила, действующая на молекулу пристеночного слоя, а Nсл — число молекул в нем, отнесенное к единице площади. Можно также написать Pi ~ . Обе величины и пропорциональны плотности или обратно пропорциональны объему газа. Предполагая опять, что газ взят в количестве одного моля, можно положить
, (4)
где а — постоянная характерная для рассматриваемого газа. Тогда (3) переходит в
Теперь надо учесть совместное действие сил притяжения и отталкивания. Для неплотных газов, к которым относятся наши рассуждения, поправки на силы притяжения и отталкивания можно вводить независимо. Тогда в результате комбинации формул (1) и (5) получится
(6)
Уравнение (6) называется уравнением Ван-дер-Ваальса. Теоретический вывод уравнения применим при выполнении условий b
Источник: https://studwood.ru/1692889/matematika_himiya_fizika/uravnenie_vaalsa
Термодинамические свойства реальных газов уравнение ван-дер-ваальса изотермы уравнения ван-дер- ваальса внутренняя энергия газа ван-дер- ваальса. — презентация
1 ТЕРМОДИНАМИЧЕСКИЕ СВОЙСТВА РЕАЛЬНЫХ ГАЗОВ Уравнение Ван-дер-Ваальса Изотермы уравнения Ван-дер- Ваальса Внутренняя энергия газа Ван-дер- Ваальса
2 ТЕРМОДИНАМИЧЕСКИЕ СВОЙСТВА РЕАЛЬНЫХ ГАЗОВ Реальные газы описываются уравнением состояния идеального газа только приближенно, и отклонения от идеального поведения становятся заметными при высоких давлениях и низких температурах, особенно когда газ близок к конденсации.
В чем причина отклонения? Причина в том, что поведение молекул в реальной системе отлично от того, как это описывается для идеального газа. Молекулы взаимодействуют. Силы взаимодействия сильно зависят от расстояния между молекулами.
Силы взаимодействия можно подразделить, как показывает опыт, на силы притяжения и силы отталкивания.
3 ТЕРМОДИНАМИЧЕСКИЕ СВОЙСТВА РЕАЛЬНЫХ ГАЗОВ Причем эти силы действуют одновременно. В противном случае тела были бы неустойчивыми.
Кроме этого необходимо, чтобы силы отталкивания преобладали на малых расстояниях, а силы притяжения на больших расстояниях. Силы притяжения действуют на расстоянии ~10 -7 см называют ван-дер-ваальсовскими силами.
Эти силы убывают прямо пропорционально r 7. F~ Силы отталкивания убывают быстрее чем ван-дер- ваальсовские силы F~ ( n>9)
4 ТЕРМОДИНАМИЧЕСКИЕ СВОЙСТВА РЕАЛЬНЫХ ГАЗОВ Предпринималось много попыток для учета отклонений свойств реальных газов от свойств идеального газа путем введения различных поправок в уравнение состояния идеального газа. Наибольшее распространение вследствие простоты и физической наглядности получило уравнение Ван- дер-Ваальса.
5 Уравнение Ван-дер-Ваальса Первая поправка в уравнении состояния идеального газа рассматривает собственный объем, занимаемый молекулами реального газа. Обозначим ее буквой b. Эта поправка представляет собой объем, который занимают все молекулы с эффективным диаметром d, находящиеся в одном моле газа. b = 4 v 0 N a, где v 0 – объем одной молекулы; N a – число Авогадро.
6 Уравнение Ван-дер-Ваальса Вторая поправка учитывает силы притяжения между молекулами газа ( силы Ван-дер-Ваальса). Обозначим ее буквой Р *.
Учтем, что, если молекула находится внутри объема газа, то силы притяжения ее остальными частицами взаимно уравновешиваются и никак не влияют на характер движения этой молекулы. Иначе обстоит дело с молекулами находящимися вблизи стенок сосуда.
Для них равнодействующая сил притяжения со стороны других молекул не равна нулю и направлена во- внутрь. Тогда Р* = а/ v μ, Где a – коэффициент Ван-дер-Ваальса, зависящий только от химической природы газа; V μ — молярный объем газа.
7 Уравнение Ван-дер-Ваальса Считается также, что силы притяжения суммируются с внешним давлением. С учетом этих соображений уравнение состояния идеального газа преобразуется в уравнение Ван-дер- Ваальса: Для одного моля Для произвольной массы
8 Уравнение Ван-дер-Ваальса Проанализируем изотермы уравнения Ван-дер- Ваальса – зависимости Р от V для реального газа при постоянной температуре. Умножив уравнение Ван-дер-Ваальса на V 2 и раскрыв скобки, получаем: PV 3 – (RT + bP) V 2 + a 2 V ab 3 = 0.
Поскольку данное уравнение имеет третью степень относительно V, а коэффициенты при V действительны, то оно имеет либо один, либо три вещественных корня – т.е. изобара Р = const пересекает кривую Р = Р(V) в одной или трех точках, как это изображено на рисунке.
9 Уравнение Ван-дер-Ваальса
10 Причем с повышением температуры мы перейдем от немонотонной зависимости Р = Р(V) к монотонной однозначной функции.
Изотерма при Ткр, которая разделяет немонотонные T Tкр изотермы, соответствует изотерме при критической температуре. При температуре выше критической зависимость Р = Р(V) является однозначной монотонной функцией объема.
Это означает, что при T > Tкр вещество находится только в одном – газообразном состоянии, как это имело место у идеального газа.
11 Уравнение Ван-дер-Ваальса При температуре газа ниже критической такая однозначность исчезает. Это означает возможность перехода вещества из газообразного в жидкое и наоборот.
На участке ВСА изотермы Т 1 давление растет с увеличением объема (dP/dV) > 0. Данное состояние неустойчиво, поскольку здесь должны усиливаться малейшие флуктуации плотности.
Поэтому область ВСА не может устойчиво существовать.
12 Уравнение Ван-дер-Ваальса В областях DLB и AGE давление падает с увеличением объема (dP/dV)Т < 0 – это необходимое, но не достаточное условие устойчивого равновесия. Эксперимент показывает, что система переходит из области устойчивых состояний GE (газ) в область устойчивых состояний LD (жидкость) через двухфазное состояние (газ – жидкость) GL вдоль горизонтальной изотермы GCL.
13 Уравнение Ван-дер-Ваальса При квазистатическом сжатии, начиная с точки G, система распадается на 2 фазы – жидкость и газ, причем плотности жидкости и газа остаются при сжатии неизменными и равными их значениям в точках L и G соответственно. При сжатии количество вещества в газообразной фазе непрерывно уменьшается, а в жидкой фазе – увеличивается, пока не будет достигнута точка L, в которой все вещество перейдет в жидкое состояние.
14 Уравнение Ван-дер-Ваальса Наличие критической точки на изотерме Ван-дер-Ваальса означает, что для каждой жидкости существует такая температура, выше которой вещество может существовать только в газообразном состоянии. К этому заключению пришел и Д.И. Менделеев в 1861 г.
Он заметил, что при определенной температуре прекращалось поднятие жидкости в капиллярах, т.е. поверхностное натяжение обращалось в нуль. При той же температуре обращалась в нуль скрытая теплота парообразования. Такую температуру Менделеев назвал температурой абсолютного кипения.
Выше этой температуры, согласно Менделееву, газ не может быть сконденсирован в жидкость никаким увеличением давления.
15 Уравнение Ван-дер-Ваальса Критическую точку K мы определили как точку перегиба критической изотермы, в которой касательная к изотерме горизонтальна. Ее можно определить также как точку, в которую в пределе переходят горизонтальные участки изотерм при повышении температуры до критической.
На этом основан способ определения критических параметров P k, V k, Т k, принадлежащий Эндрюсу. Строится система изотерм при различных температурах. Предельная изотерма, у которой горизонтальный участок LG переходит в точку, будет критической изотермой, а указанная точка – критической точкой.
16 Уравнение Ван-дер-Ваальса Критические значения для температуры, давления и объема можно определять по формулам:
17 Внутренняя энергия газа Ван-дер- Ваальса Энергия одного моля газа Ван-дер- Ваальса слагается из внутренней энергии молекул, составляющих газ: кинетической энергии теплового движения центра масс молекул, равной потенциальной энергии взаимного притяжения молекул.
18 Внутренняя энергия газа Ван-дер- Ваальса Потенциальная энергия притяжения молекул равна работе, необходимой для разведения молекул на бесконечное расстояние друг от друга.
В этом конечном состоянии молекулы не взаимодействуют друг с другом, а потенциальную энергию можно считать равной нулю.
Дополнительное давление газа Ван-дер- Ваальса за счет взаимного притяжения молекул равно a/V m 2, и, следовательно, потенциальная энергия взаимодействия равна
19 Внутренняя энергия газа Ван-дер- Ваальса Знак «минус» указывает на то, что между молекулами действуют силы притяжения; V μ – молярный объем, V μ = V/, = m/. Полная энергия одного моля газа Ван-дер-Ваальса определяется соотношением
20 Заключение Принципиальное значение уравнения Ван-дер- Ваальса определяется следующими обстоятельствами: уравнение было получено из модельных представлений о свойствах реальных газов и жидкостей, а не явилось результатом эмпирического подбора функции f(p,V,T), описывающей свойства реальных газов; уравнение долго рассматривалось как некоторый общий вид уравнения состояния реальных газов, на основе которого было построено много других уравнений состояния;
21 Заключение С помощью уравнения Ван-дер-Ваальса впервые удалось описать явление перехода газа в жидкость и проанализировать критические явления. Причиной недостаточной точности уравнения Ван-дер-Ваальс считал ассоциацию молекул в газовой фазе, которую не удается описать, учитывая зависимость параметров a и b от объема и температуры, без использования дополнительных постоянных.
Источник: http://www.myshared.ru/slide/616559/